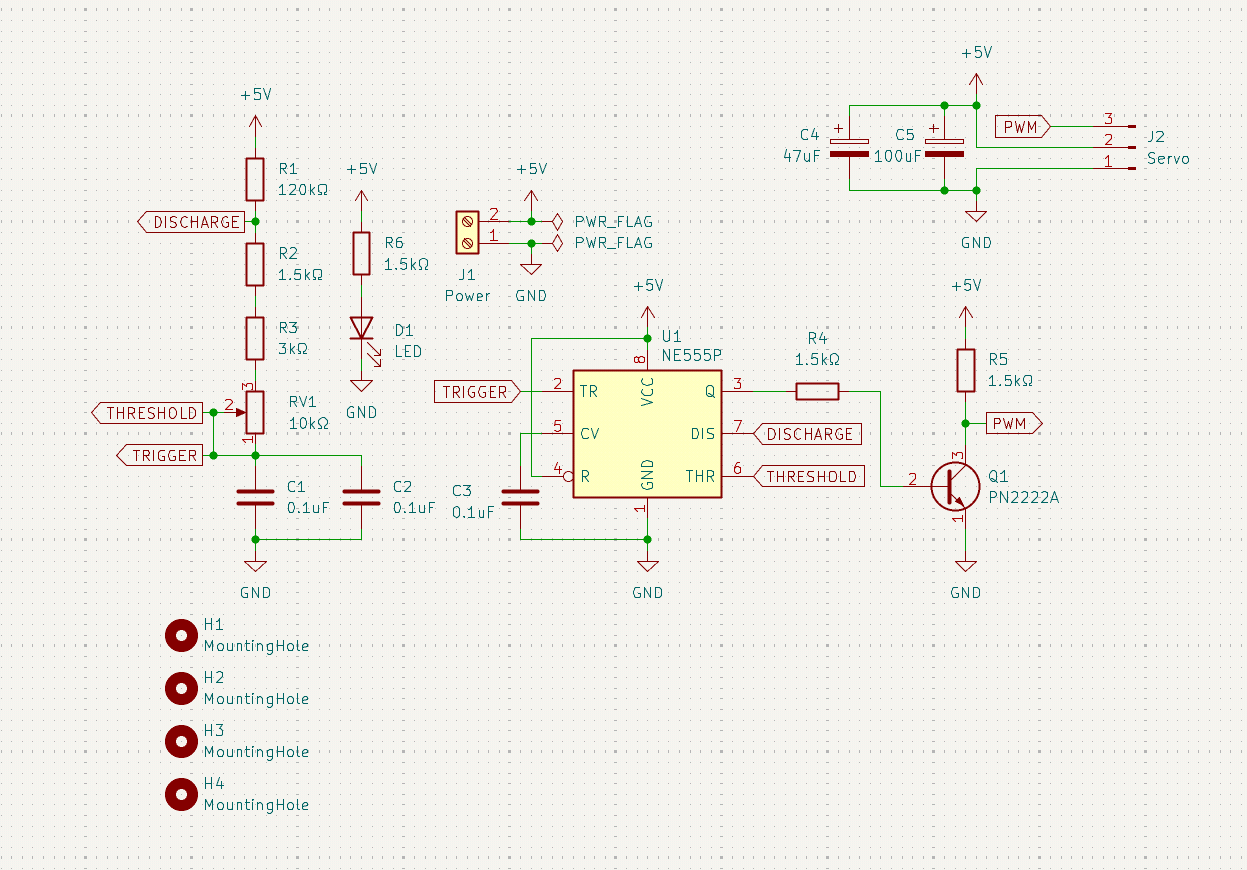
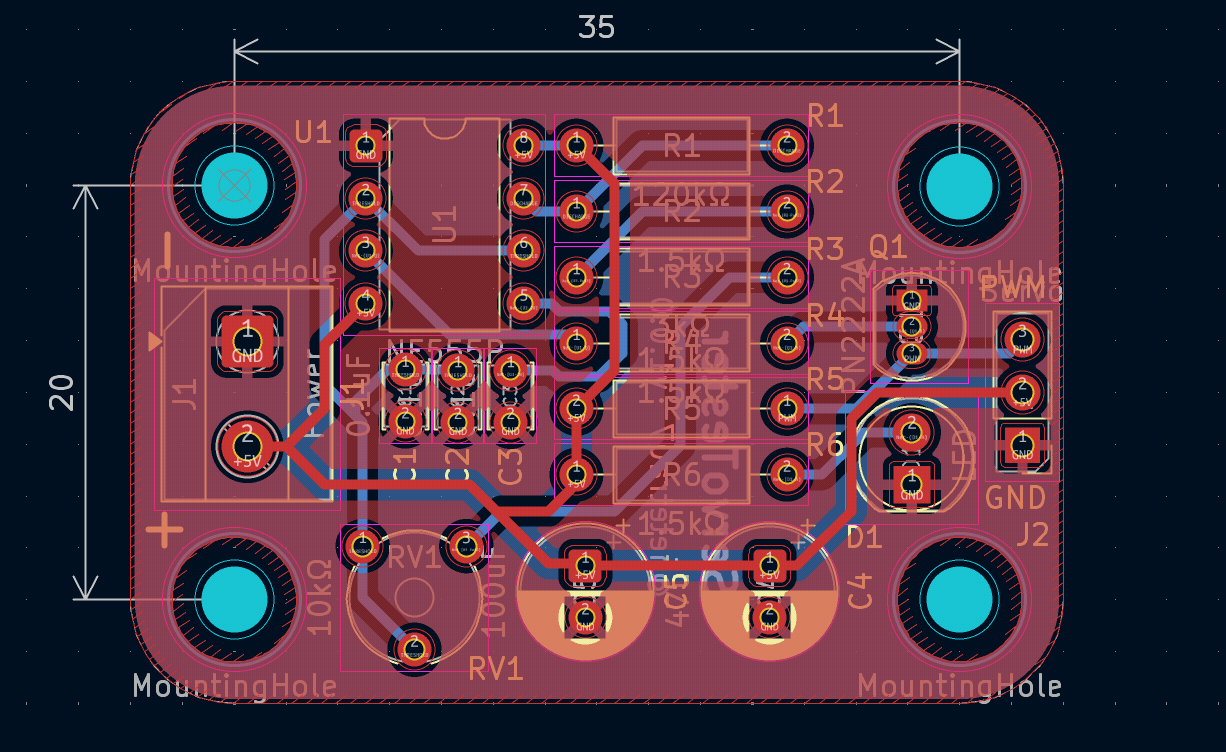
サーボ死んだか確かめるためにマイコンで毎度PWM出すのは非効率なので。 壊れたらロボ研の設計班でもはんだ付けして直せるように全部DIPです 追記: 小さいけどドライバで回すタイプの可変抵抗は良くない。脆すぎる